Méthode d’Euler
On cherche à résoudre numériquement
une équation différentielle.
Plus précisément, on cherche la solution
au problème de Cauchy suivant :
$ \left\{ \begin{aligned} &y’(t) = f(t,y(t)) \\ &y(t_0) = y_0 \end{aligned} \right. $
L’idée générale est de discrétiser le temps
par un pas $h$ tel que $t_{i+1}=t_i + h$
et d’utiliser $f(t,y)$ pour approximer
$y(t_{i+1})$ à partir de $y(t_i)$.
Explicite / Implicite
Dans les exemples qui suivent, on utilise :
avec :
- $y_\infty = 10$
- $\tau = 2$
Méthode d’Euler explicite
Dans cette méthode, on utilise la pente au point de départ pour obtenir le point d’arrivée :

Méthode d’Euler implicite
Dans cette méthode, on utilise la pente au point d’arrivée pour obtenir le point d’arrivée :
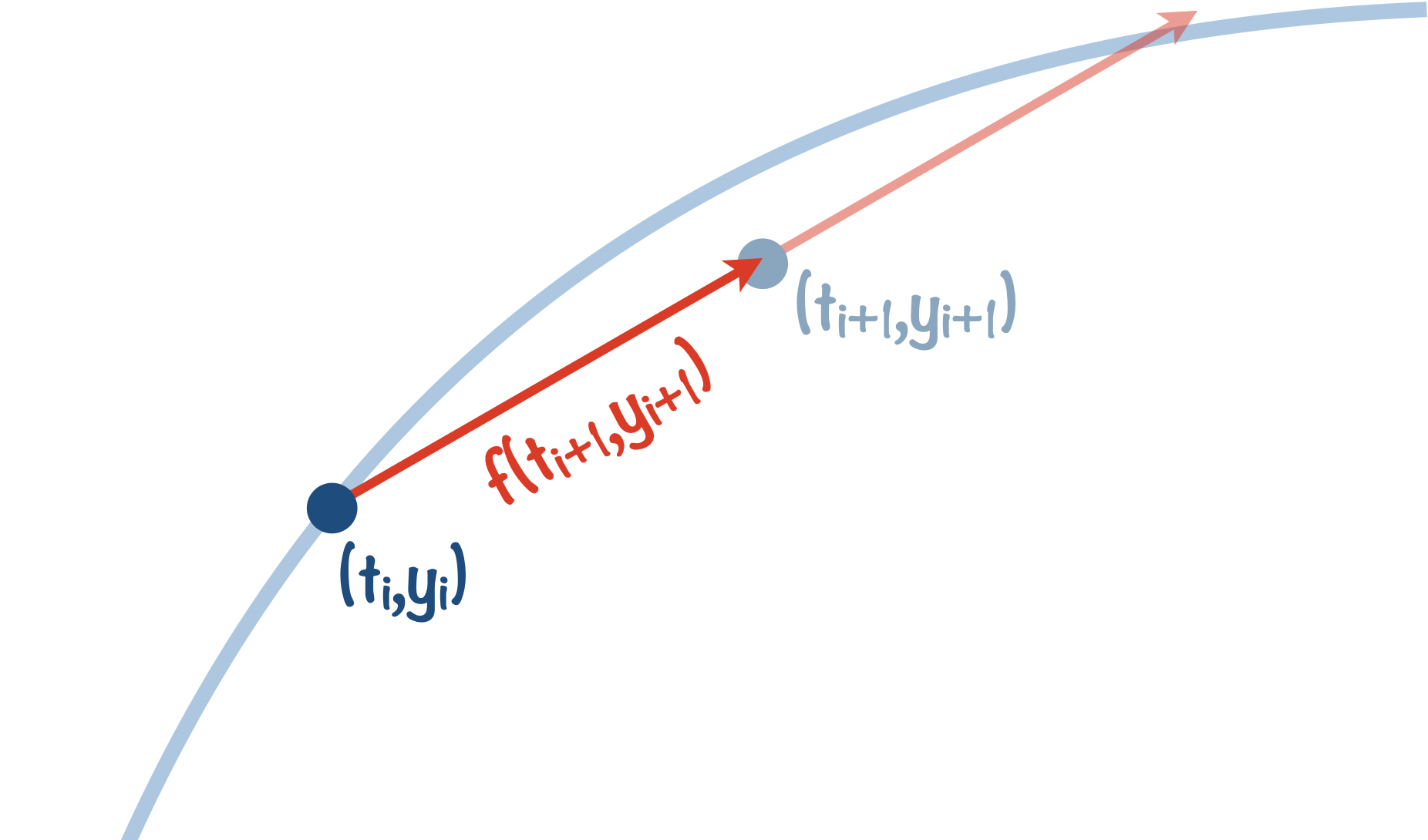
La méthode implicite demande plus de calculs puisqu’on souhaite utiliser $y_{i+1}$
pour déterminer $y_{i+1}$.
$\Rightarrow$ on se retrouve avec une équation à résoudre…
Dans notre exemple :
$$ \begin{aligned} y_{i+1} &= y_i + h\times f(t_{i+1},y_{i+1})\\ &= y_i + h\times \frac{y_\infty-y_{i+1}}{\tau} \end{aligned} $$ D’où
$$ \displaystyle y_{i+1}= \frac{y_i + \frac{hy_\infty}{\tau}}{1+\frac{h}{\tau} } $$
Equa diff d’ordre > 1
Pour gérer une équa diff d’ordre $n$,
on la transforme en un système de $n$ équa diff d’ordre 1 en définissant une nouvelle variable
pour chaque $y^{(i)}$ pour $i\in\{1\ldots n-1\}$
Exemple :
l’équation d’un oscillateur amorti
$$ \ddot{x}(t) = -\frac{k}{m}(x(t)-l_0)-\frac{\alpha}{m} \dot{x}(t) $$
devient :
$$ \begin{cases} \dot{x}(t) = v(t) \\ \dot{v}(t) = -\frac{k}{m}(x(t)-l_0)-\frac{\alpha}{m} v(t) \end{cases} $$
Erreur de troncature locale
C’est la petite erreur faite à chaque étape.
De $(t_0,y_0)$ à $(t_1,y_1)$ avec $t_1 = t_0+h$,
la solution numérique donne :
$y_1 = y_0 + hf(t_0,y_0)$
Et la solution exacte (développement de Taylor) :
$y(t_1) = y(t_0) + hy’(t_0) + \frac{1}{2}h^2 y’’(t_0)+O(h^3)$
D’où une erreur $|y_1-y(t_1)|$ en $\color{red}O(h^2)$.
Erreur de troncature globale
C’est l’accumulation des erreurs locales de $t_0$ à $t$.
Nombre d’étapes : $\lfloor \frac{t-t_0}{h}\rfloor$ $\Rightarrow$ en $O(1/h)$.
D’où une erreur de troncature globale en $O(h)$.
C’est pour cette erreur linéaire en $h$
que la méthode d’Euler (explicite ou implicite)
est dite d’ordre 1.
Erreur d’arrondi
Explique pourquoi diminuer $h$ finit par ne plus apporter de précision supplémentaire.
x = 1.0
p = 0
while x != x+1 :
x *= 2
p += 1
print(x)
print(p)
Le code ci-dessous trouve la première puissance de 2, $x$, pour laquelle $x+1$ est arrondi à $x$ (absorption), provoquant une erreur relative
(la plus grande possible) de $1/x$.
l’epsilon machine ou précision machine
est la limite supérieure de l’erreur relative d’approximation causée par l’arrondi.
En python, comme la mantisse d’un flottant correspond à 53 bits, l’errreur relative se fait sur le dernier bit et vaut donc $2^{-53}$ ($\varepsilon=2^{-52}$ au pire entre deux arrondis consécutifs).
Par conséquent, l’erreur d’arrondi sur chaque valeur $y_n$ obtenue par la méthode d’Euler
est de l’ordre de $\varepsilon y_n$.
Et en considérant ces erreurs d’arrondi
comme des variables aléatoires indépendantes,
l’erreur relative d’arrondi totale va être de l’ordre de $\varepsilon\sqrt{n}$ où $n$, le nombre de valeurs calculées,
est inversement proportionnel au pas.
Finalement, l’erreur d’arrondi globale
est proportionnelle à $\frac{\varepsilon}{\sqrt{h}}$
et donc diverge lorsque $h$ tend vers 0 !
Réduire l’erreur de troncature se fait
au détriment de l’erreur d’arrondi.
Néanmoins, on peut se prémunir en bonne part des erreurs d’arrondi grâce à une sommation compensée (algorithme de Kahan).
Stabilité numérique
Partons de l’équation différentielle linéaire $y’=ky$ La méthode explicite donne alors :
$y_{n+1}= y_n(1+hk)$
$\Rightarrow y_n = y_0(1+hk)^n$
la solution numérique ne sera stable que si
$|1+z| ≤ 1$ avec $z \equiv hk \in\mathbb{C}$
En généralisant à un système différentiel linéaire de la forme : $y’(t)=My(t)$
(où $M$ est une matrice carrée)
il faudra, pour obtenir une solution stable,
que chaque valeur propre de $M$
soit dans le disque précédent.
Pour l’exemple de l’oscillateur amorti : $$\begin{pmatrix}\dot{z}_1\\ \dot{z}_2\end{pmatrix}=\begin{pmatrix}0&1\\ -{\omega_0}^2 & -\frac{\omega_0}{Q}\end{pmatrix}\begin{pmatrix}z_1\\ z_2\end{pmatrix}$$
On obtient deux valeurs propres complexes
si $Q>1/2$ :
$$\lambda_{\genfrac{}{}{0pt}{}{1}{2}} = \omega_0\left(\frac{1}{2Q} \pm i\sqrt{\left(1-\frac{1}{2Q}\right)^2}\right)$$
et donc pour que $hk=h\lambda_{\genfrac{}{}{0pt}{}{1}{2}}$ soit à l’intérieur
du domaîne de stabilité, il faut que
$\left(-\frac{h\omega_0}{2Q}+1\right)^2 + \left(\frac{h\omega_0}{2Q}\right)^2(4Q^2-1) ≤ 1$.
La domaîne de stabilité
de la méthode d’Euler implicite est
beaucoup plus grand que celui de l’explicite :
il correspond au complément du
disque de rayon 1 centré sur $(1;0)$.
Donc dans le cas de l’oscillateur amorti, toutes les solutions sont stables, quel que soit le pas !
Conservation de l’énergie
Comme on peut le voir sur l’exemple précédent, aucune des deux méthodes ne sait gérer de manière satisfaisante l’oscillateur harmonique !
On dit que ces méthodes ne sont pas symplectiques (elles ne conservent pas l’énergie).
Une solution simple existe :
la métode d’Euler semi-implicite !
C’est aussi une méthode d’ordre 1, mais l’erreur n’est plus maintenant concentrée sur l’amplitude, mais sur la phase.
principe :
on mixe méthode explicite et implicite en utilisant le vieux ${z_2}_i$ pour obtenir ${z_1}_{i+1}$ :
${z_1}_{i+1} = {z_1}_i + h{z_2}_i$
et le nouveau ${z_1}_{i+1}$ pour obtenir ${z_2}_{i+1}$ :
${z_2}_{i+1} = {z_2}_i + hf({z_1}_{i+1},{z_2}_i,t_i)$
Son implémentation est souvent très simple (plus simple même que l’explicite) puisqu’on n’ a même plus besoin des variables z1_old et z2_old :
z1 += h*z2
z2 += h*alpha/m*z2 + h*k/m*(z1-l0)
La méthode semi-implicite peut s’avérer instable (contrairement à l’implicite).
Méthodes d’ordre supérieur
Ces méthodes permettent d’obtenir une erreur
de troncature globale en $O(h^\text{ordre})$.
Les plus simples à implémenter sont les méthodes de type Runge-Kutta qui consiste à moyenner
les tangentes en différentes positions.
En pratique, les physiciens utilisent le plus fréquement la méthode Runge-Kutta d’ordre 4 (RK4) qui offre un bon compromis entre précision et vitesse (le pas n’a pas besoin d’être très faible pour obtenir des résultats convenables).